Buried pipe networks are fundamental to much engineering infrastructure supporting urban life, such as sewage, water, and gas mains. With heavy use, deterioration of these pipes and the occurrence of faults is inevitable, so it is necessary to monitor the condition of the pipe wall and inspect the interior for blockages. It is important that inspection is carried out regularly and pre-emptively, rather than in response to significant failures, if the pipes are to remain in constant use.
The aim of this project is to develop an ultrasonic sensor system and associated data analysis tools to extract information from the interior of a buried pipes, to detect and characterise defects such as cracks and corrosion. Existing pipe inspection methods, such as CCTV, LIDAR and acoustic leak detection have a variety of strengths and weaknesses and suit different use cases. For example, images captured using CCTV are very high resolution, which provides potential for the detection of even small defects, but also poses problems in the manual or automated processing of vast datasets, a significant proportion of which does not contain information about defects or even the pipe surface. CCTV devices are also typically tethered due to the power requirements of their cameras and lighting, which poses a restriction on access. Thus, this project aims to test the feasibility of a novel untethered, air-coupled ultrasonic array and to assess if it provides unique strengths that may make it preferable for certain scenarios. Potential strengths include low power consumption (making an untethered device feasible) and the output of appropriate resolution images that provide high contrast of defects without having cumbersome file sizes, making automated processing and defect detection feasible.
An important objective of this project is to optimise the arrangement of the transducers in the array. Using more transducers generally provides better imaging performance, but increases the array size, cost, data capture time, dataset size and data processing time – thus it is desirable to keep the transducer count as low as possible whilst still producing images of sufficient quality. To date, this objective has been addressed by selecting subsets of dense arrays and numerically assessing their imaging performance on various test objects, through both experiment and simulation. Going forward, the objective is to improve the physical understanding behind imaging in this environment, and use this to design a more optimised array. After optimization, another significant objective is to develop automated detection and classification of a range of defects.
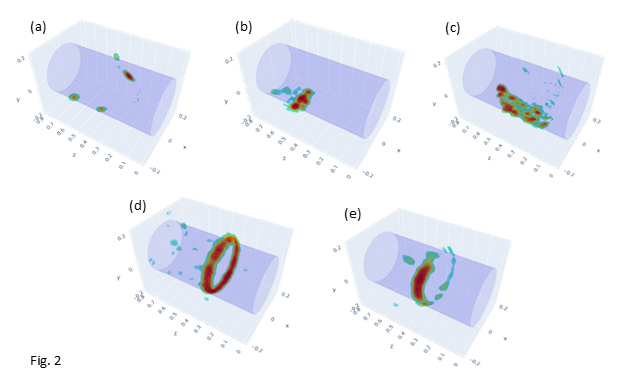
The device in its current state is shown in Fig. 1 – it consists of an array of 64 ultrasonic transducers (40 kHz) mounted on a commercial drain crawling robot alongside supporting electronics (a Raspberry Pi and a compact oscilloscope and multiplexer).
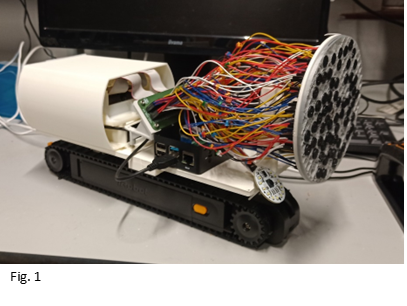
This device is used to make Full Matrix Capture (FMC) array measurements, and this data is processed into 3D images using the Total Focusing Method (TFM). Fig. 2 shows a sample of the images captured so far, featuring a range of defects in 300 mm diameter pipes – (a) shows a scan of 4 through holes 2-8 mm in diameter in a steel pipe, (b) shows a partial blockage consisting of a bag of soil at the bottom of the pipe, (c) shows a rough section in an otherwise smooth pipe, (d) shows a properly aligned joint, and (e) shows the same joint with angular misalignment.